400-021-2699
▏系统特点
①利用相机拍照,结合零件自身的三维信息,实现零件相对于初始状态的6种自由度精确定位(3方向位置及3方向旋转角度)
②3D引导:x, y, z位置偏移及角度偏转
③结构紧凑,传感器体积小
④兼容移动式/固定式,安装于机器人6轴或通过固定支架安装
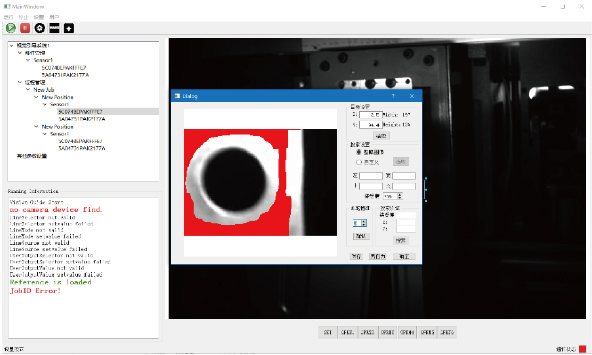
▏显示界面
▏系统参数


 微信公众号
微信公众号


 微信公众号
微信公众号