

 微信公众号
微信公众号
▏应用类型
视觉系统
▏客户需求
上盖抓取视觉引导
▏应用挑战
上盖拐角需拍照定位
▏解决方案
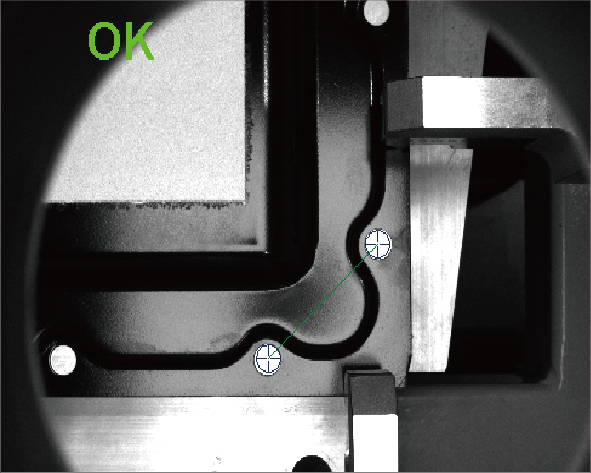
相机依次随机器人移动到拐角拍照位,定位两拐角的坐标P1和P2,以上两点计算出中点P0,以及2点确定产品的角度A;将当前工件的P0坐标以及角度与模板位置的中心坐标及角度进行比较,将差值发送给PLC。
▏最终效果
机器人带着相机拍摄产品,相机将产品位置反馈个机器人,机器人实现最终抓取
▏应用界面

微信公众号